※本コンテンツはアキバ総研が制作した独自コンテンツです。また本コンテンツでは掲載するECサイト等から購入実績などに基づいて手数料をいただくことがあります。
腕は「肩アーマーから生えている」のではなく、「胴体から生えている」んですよね?
初期のガンプラというか80年代初期のロボットプラモでたまに見かけるのは、「腕が肩アーマーから生えている」状態。たとえば、1980年発売の初代「1/144 ガンダム」は腕を左右に開くことができたんだけど、四角い肩アーマーの内側に可動軸があって、その軸に腕が接続されているに過ぎない。だから、脇の下から見ると隙間が合って、腕は胴体と離れているわけです。たとえば1983年スタートのMSVシリーズでも、「腕が肩アーマーから生えている」キットはちらほら見かけたものです。
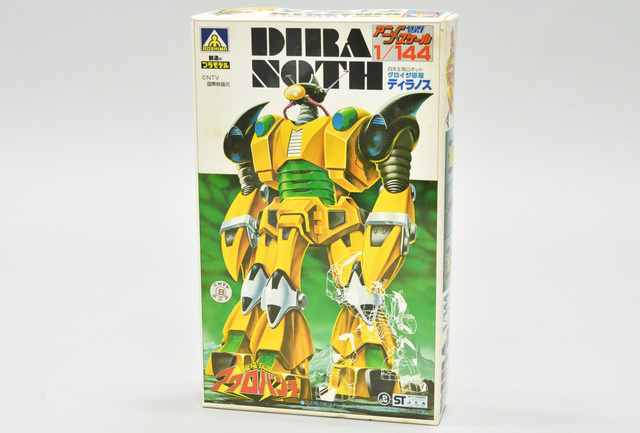
ところが1982年発売のこのディラノス、ちゃんと「胴体から腕が生えてます」。具体的に見ていくと……
▲ まず、上腕パーツの内側にT字形の可動軸を組みこむ。これで水平方向への可動は確保される。いま見ると当たり前のようだが、上腕から胴体へ繋がる軸が飛び出している点が重要なんですね
▲ 先端のハサミパーツが造形・可動ともやけによくできているのですが、これと上腕を前腕パーツで左右から挟みます。こうして見ると、上腕からまっすぐに軸が突き出ていることがわかります
▲ そして、組み上がった腕を肩アーマーに組み込む。上腕から突き出ていた可動軸を、肩アーマーの内側パーツへはめ込む……つまり、肩アーマーが「アーマー」として機能していて、腕はしっかり胴体から生えている
何がどうすごいのかはなかなかわかってもらえないだろうが、人間の腕って、胴体から生えてますよね。でも、ロボットの外見だけとらえて、腕が水平方向へ開く機構だけ考えれば肩アーマーの裏で腕を固定すれば、それでも成立はする。このディラノスだって、大きな肩アーマーがあるんだから、その内側に軸を設ければ可動はするわけですよ。
だけど、ちゃんと肩アーマーを貫いて、腕と胴体が直結している。言葉にすると難しいけど、これはなかなか「わかっている」というか、センスいいと思うのです。
▲ おっと、脚の組み立てを完全に忘れておりました。脚、3本あるんだよね。箱状のフトモモを組んだ上からスネを左右から挟むオーソドックスな構造。わかりづらいけど、写真左に映っているのが胴体中央につく3本目の脚のパーツです
▲ 左右の脚は、軸パーツにはめ込んで胴体の内側に固定します。脚を水平方向へ広げたりひねったりする機構はなく、素朴な前後可動のみ。しかし、堅実な構造だと思う
▲ そして、両脚を胴体ではさんだら終わりではなくて、この左側に映っているもう1本の脚。これを、股間のど真ん中へ接着する指示があります。いや、脚は2本だけで直立できるでしょう? つい、腕と胴体の関係に注目しすぎてしまったが、ディラノスの最大の特徴は三脚メカであること。まだ接着してないけど、両脚と同じデザインの第三の脚が、包み隠さず堂々と股間から生えている。しかも、股間に空いているのは、ただの丸い穴。この穴に第三の脚をポコッと接着する! この構造、大胆なのか投げやりなのか。三脚メカって「伝説巨神イデオン」で見慣れているはずなんだけど、とんでもないデザインに思えて仕方がない。では、股間の穴にもう1本の脚を接着して、完成を急ごう!













![魔境伝説アクロバンチ コンプリート DVD-BOX (全24話, 600分) まきょうでんせつアクロバンチ アニメ [DVD] [Import] [P...](https://m.media-amazon.com/images/I/51od+S8wLAL._SL500_._SL200_.jpg)