※本コンテンツはアキバ総研が制作した独自コンテンツです。また本コンテンツでは掲載するECサイト等から購入実績などに基づいて手数料をいただくことがあります。
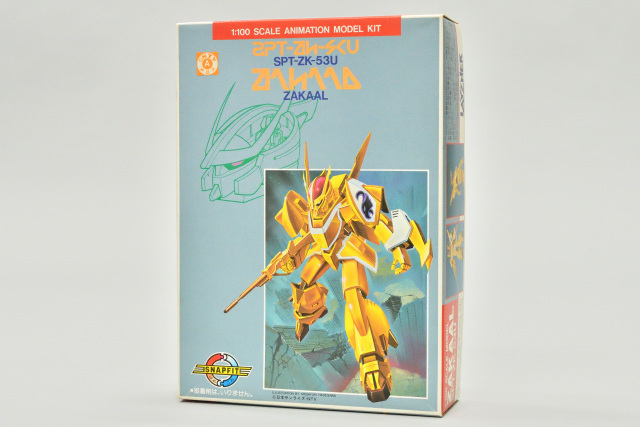
組み立てはオーソドックスに、手足と頭を別々に組んでから、胴体にはめ込む……胴体パーツで手足を前後から「挟み込む」と、箱型の四角すぎる胴体になりやすいのが80年代ロボットプラモの罠。しかし、このザカールの場合、胴体を組んだ後に手足を「はめ込む」方式だ。少なくとも、箱みたいなロボにはならないだろう(多分)。まずは、腕から見ていこう。
▲ 腕は上腕パーツを肩ブロックと前腕ブロックで挟みこむことで、肩とヒジが可動する。特筆すべきは、左腕のクロー(“ホーン・オン・アーム”という名前だそうです)が別パーツで、可動すること。アクションポーズに生かせそう?
▲ 腕の組み立ては、あんまり面白くなかった。でも足首はどうだ! 正面から見ると、足首全体が中央に向けて傾斜してるんだよ! この造形によって、足を左右に広げて、しっかり地面を踏みしめたポージングになる(はず)!
▲ 足首と、フトモモをスネのパーツで左右から挟む。すると、ヒザと足首は前後に軸可動するわけだ。先ほど書いたように足首は内側に傾斜した造形なので、まるで斜めに曲がるように見える
股を開いても足裏が確実に接地するように、足首自体を左右に振る可動軸は、1981年12月発売の「機動戦士ガンダム」シリーズの1/100グフ、1/60ドムあたりから採用されはじめた。1/144では単軸可動のままだったが、足全体を傾斜させた造形は、後期MSV(1984年9月発売のジョニー・ライデン少佐用ゲルググなど)にも見られる。
つまり、可動のためにパーツを割くほどの余裕がない場合、足全体を左右に踏ん張って素立ちしたポーズ優先にする、なかば固定モデルとして割り切る志向が1984~85年ごろのバンダイに発生していたのは確かと言える。
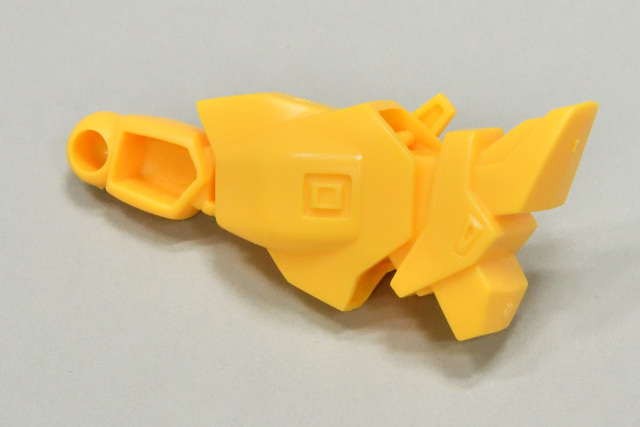
▲ ランナー状態から「チマチマした細かいパーツが4つもあるけど何だろう?」と怪訝に思っていたのだが、足側面の小さなバーニアノズルが、すべて別パーツになっていた! ノズル類が別パーツだと、精密感が段違いだ
▲ そして、股の関節パーツに左右の足を差し込む。股パーツは傾斜がかかっており、左右の爪先が少しだけ外側へ開く。設定画で多く見かける素立ちポーズをいかにカッコよくするか……に、注意が向けられていたことがわかる