※本コンテンツはアキバ総研が制作した独自コンテンツです。また本コンテンツでは掲載するECサイト等から購入実績などに基づいて手数料をいただくことがあります。
まず巨大な両腕を組もう! それなりに凝った構造で、期待が高まるぞ!!
最初に、腕の組み立てから入る。モラーバーをはじめとするエマーン人が使うのは、「ドリファンド」(ドリフト・ハンドが語源)と呼ばれる腕のみのメカ。敵側は足のみの「ガウォーク」。主役ロボのオーガスは手足を持ったメカだが、腕はモラーバーのパーツをそのまま転用している設定がミリタリックというか、異世界なりの実用感があってカッコいい。
しかし、1/42スケールのオーガスは発売されなかったので、このキットの腕パーツはモラーバー専用で汎用性がないのだなあ……などと感慨にふけられるのも、アニメロボプラモならではの贅沢な楽しみだ。
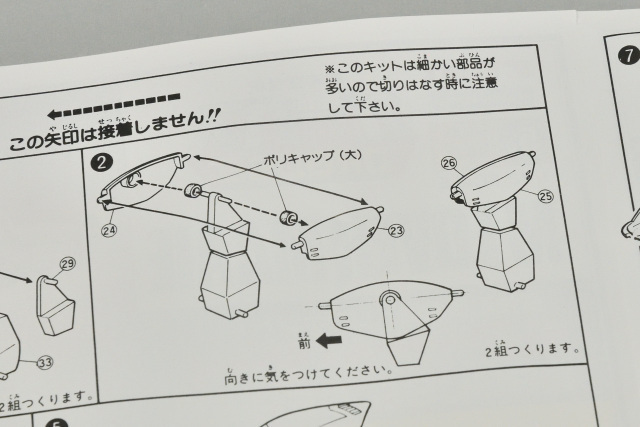
▲この、肩の付け根が平行ではなくて斜めに切れ上がっているのが、宮武一貴さんっぽいというかスタジオぬえ特有の面倒くささ(笑)。この写真の段階では、前後を間違って組んでしまった。それはさておき、左右に腕を開くための可動軸にポリキャップを使っているのが好印象
▲上腕部を左右に開くよう肩パーツで挟み、さらに前後にスイングさせるため、さや状の肩ユニット内に組み入れる。ポリキャップの使い方、白と赤のパーツの色分けもきれい。アリイ製だけど、けっこういいキットじゃん!
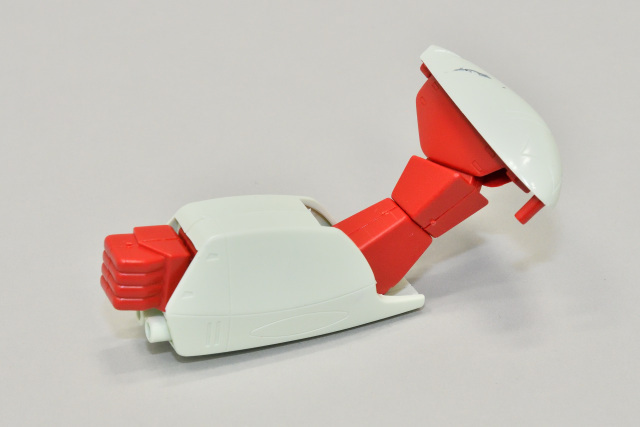
▲しかし、手首はブロックみたいに四角い……。もうちょっと、指の構造を意識して造形してほしかったかな。そして、前腕の内部をスライドして出てくるように、手首を取り付けるのだが……いやいやいや、引っかかって出てこないじゃん(笑)
▲内部に詰まったまま出てこなくなると困るので、手首は前腕から出ている状態で組んだ。やっぱり、上腕の向きが逆だよね。この後、分解して組みなおしました
▲この板は何かというと、巨大な両腕を胴体にセットするためのパーツです。ポリキャップを使うとはいえ、こんな薄いパーツでけっこう重たい両腕を支えるのは、構造的に無理があるような……。完成後、うっかり割ってしまった
▲腕の次に、胴体左右につくエンジンも組んでおこう。微妙なカーブで湾曲した箱を2つ組むのだが、箱の前後にインテーク状の細部が別パーツで付く。こういう、可動と関係ないディテール表現のためにパーツを割いている点がよい
モラーバーの構造はシンプルで、細長い胴体の背中から腕が生え、腹の部分に左右からエンジンブロックが付く。なんという無駄のない、美しい構成なのだろう。
ただし、コクピットにはあの人間とは思えないシュールな造形のフィギュアが……うーん、どういう仕上がりになるんだろうか? ここまで組んだ感触は、けっこういい。造形センスもいいし、可動個所もツボを押さえている。いいぞいいぞ。この高揚感のまま、最終段階へ進もうではないか!





















![超時空世紀オーガス(1) [DVD]](https://m.media-amazon.com/images/I/51ZhwCADicL._SL500_._SL200_.jpg)